
東京大学 大学院 情報理工学系研究科 知能機械情報学専攻
職名:准教授 助成期間:令和3年度〜 キーワード:フィジカルリザバーコンピューティング 非線形力学系 ソフトロボティクス 研究室ホームページ
2009年、東京大学大学院総合文化研究科博士課程取得。博士(学術)。チューリッヒ大学人工知能研究室、スイス連邦工科大学チューリッヒ校にてポスドク研究員を経て、2013年にJSPS海外特別研究員となる。2014年から2017年まで京都大学白眉センター特定助教、2015年から2019年までJST PRESTOさきがけ研究者(兼任)。2017年から2020年まで東京大学大学院情報理工学系研究科先端人工知能学教育寄付講座特任准教授を務める。2020年より現在まで、同研究科情報理工学教育研究センター次世代知能科学研究部門、同研究科創造情報学専攻にて准教授(兼担)。2022年より現職。
従来のリザバーコンピューティングからご説明しましょう。これはニューラルネットワーク(人間の脳の神経網を模した数理モデル)を用いた機械学習法の一種で、入力層から送られてきたデータを中間層で演算し、それをフィードバックする再帰型ニューラルネットワークを利用したものです。中間層をリザバー(貯水槽)と呼び、ここには過去の入力情報が残存しています。リザバー部に膨大な数の計算素子をランダムに結合しておけば、高い表現能力が得られることが知られています。
PRCでは、リザバーコンピューティングの中間層(リザバー部分)に、ニューラルネットワークではなく物理系を使用します。2000年代初頭にこのフレームワークが考案されて以来、様々な物理系がリザバーとして利用されています。
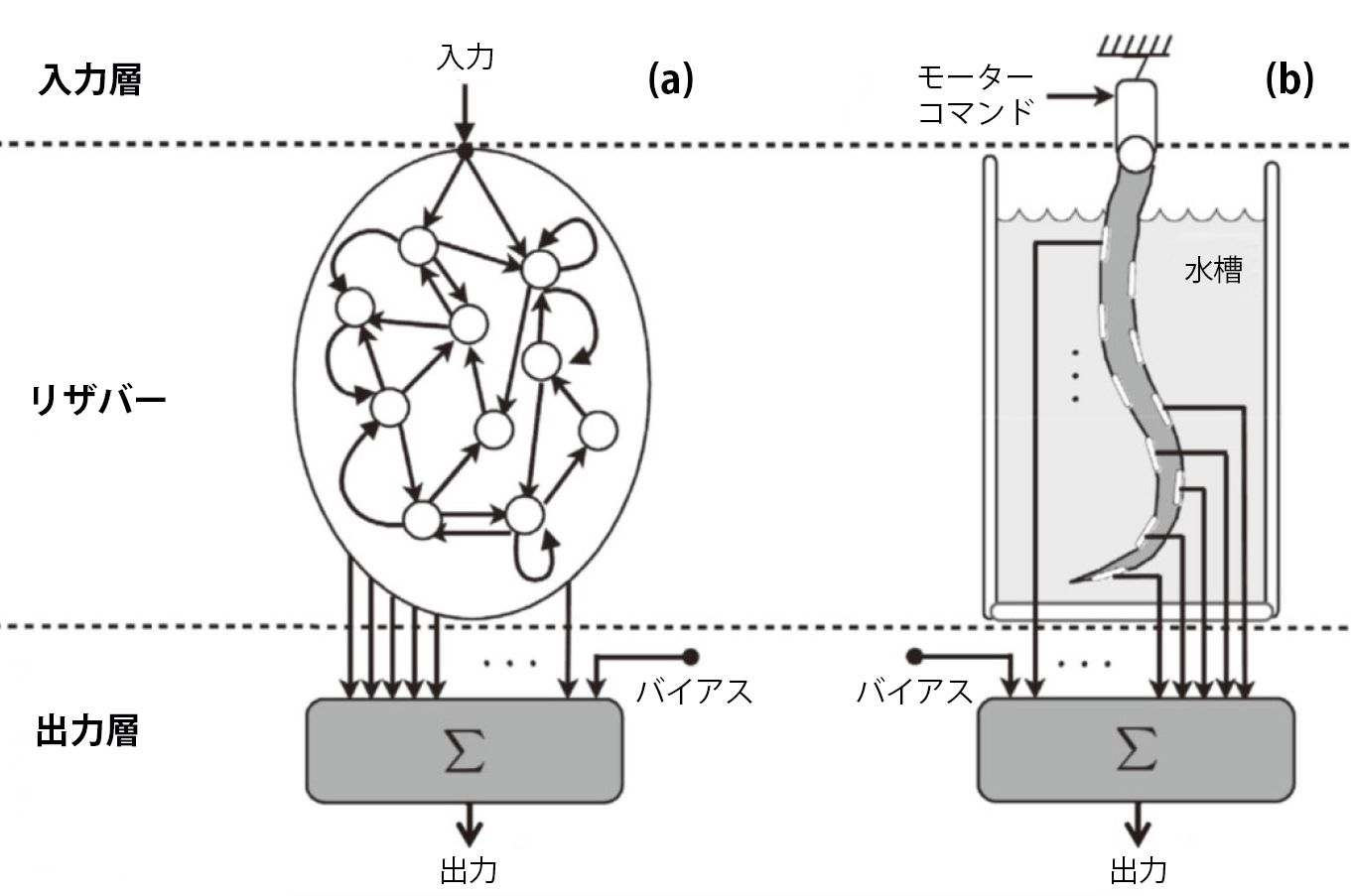 通常のReservoir Computing(a)とPhysical Reservoir Computing(b)の比較図
通常のReservoir Computing(a)とPhysical Reservoir Computing(b)の比較図
大学生の時に抱いた「人間の意識はどこから生まれるのか」という素朴な疑問から、ニューロサイエンス(神経科学)の分野に足を踏み入れ、身体性認知システムなどの研究に取り組んできました。
転機となったのは、スイスでポスドク研究員として参加したEUプロジェクト「OCTOPUS」。既存の硬いロボットから脱却し、柔らかいタコをモデルに、より生物に近いロボットの開発を目指す、ソフトロボティクスの先駆けとなるプロジェクトでした。私の担当はロボットの制御で、プロジェクトのアドバイザーには「過去の技術の応用ではなく、ソフトロボット用の技を創り出せ」と発破をかけられましたが、初めてのソフトロボットを前に、まったくアイディアが浮かびませんでした。
それでも考え続けるうちに、硬いロボットに比べてソフトロボットはダイナミクス(非線形力学系)が非常に多様になることに気づき、ボディそのものがリザバーの役目を果たしうる、と思い至りました。ボディで計算できるなら、外付けの制御器は不要で、自律的に動くシステムを作れます。この構想を実現し、プロジェクトのアドバイザーからも「Revolutionary!」との言葉をいただくことができました。ソフトロボットとPRCが繋がった瞬間です。
 タコの腕をモデルに作られたソフトロボット。柔軟な動きはタコそのもの
タコの腕をモデルに作られたソフトロボット。柔軟な動きはタコそのもの
ロボットの根本にあるモーターの動きが入力信号です。信号は時間差を持って腕の先端に伝わるため、腕の形を見れば、直感的にも過去の入力が推測できますよね。
学習を積めば、現在の形から過去の入力が正確に導き出せるようになります。それが可能なのは、この物理系が過去の入力を分離して取り出せる形で蓄えるメカニズム、すなわち記憶としての機能を備えているからなのです。
タコの腕だけでなく、折り紙やテンセグリティ(剛体を紐などで繋ぎ、張力で全体のバランスをとる構造)を応用したロボットをリザバーとするPRCも開発されています。
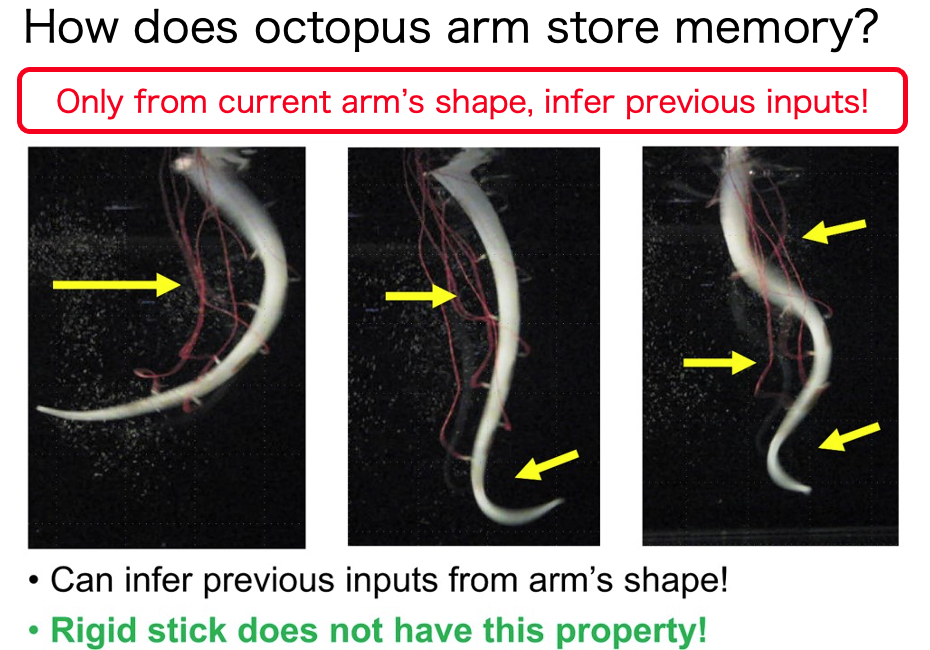 実際の演算は、水中のタコの腕の応答をセンサーで計測し、その値にウエイトをかけることで実行される
実際の演算は、水中のタコの腕の応答をセンサーで計測し、その値にウエイトをかけることで実行される
世界中で、様々な物理系が実装されています。レーザーを利用した光リザバー計算、スピントルクオシレーターという特殊な磁石を用いた計算、培養細胞を利用した計算など、枚挙にいとまがありません。
私自身も物理の各分野の研究者と共同研究を進め、量子多体系、スピントロニクス系などでPRCを展開してきました。さらに昨年、生態学を専門とする共同研究者とともに、テトラヒメナという単細胞生物において、温度を入力データとした場合、それに応じた個体数の増減がリザバーとして使えることを発見しました。ある魚種の生息数の時系列データを温度に変換してテトラヒメナPRCに入力すると、数年後の生息数が計算され、それが実際のデータと一致するのです。漁獲量をテトラヒメナに予測させることも、夢ではないかもしれません。


