



準備研究の段階で、地面の匂い痕跡から、匂いの空間分布情報を取得できる「高速LSPRガスセンサロボット」を開発しました。このロボットには「匂いが見える鏡」が搭載されており、匂い物質を検知するとロボット上部のランプが光るようになっています。なお、このロボットの改良機も開発しています。
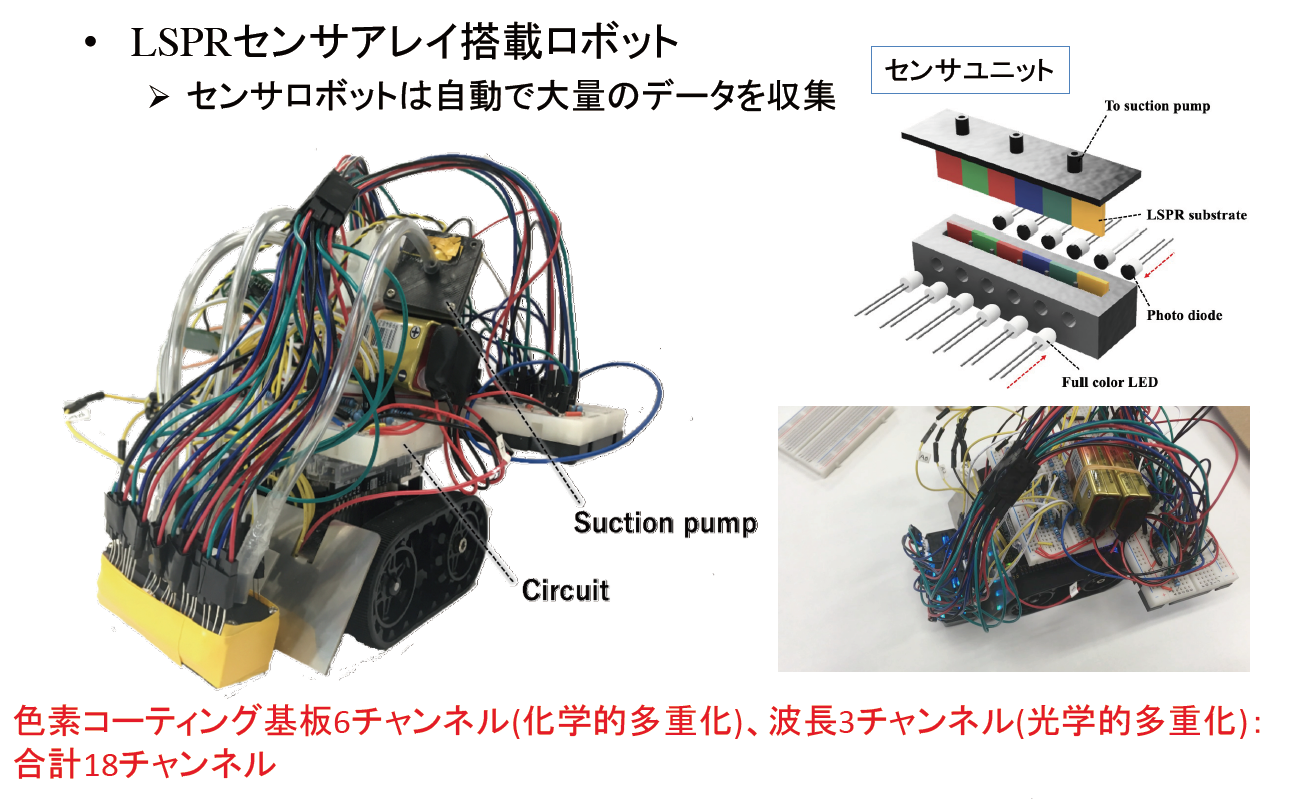
センサの改良では匂い物質で色が変わる色素をフィルタ膜に加え、匂いに関する情報を増やしています。300以上の波長の変化が匂い物質の情報を持っているため、センサの性能を大幅に上げることができました。
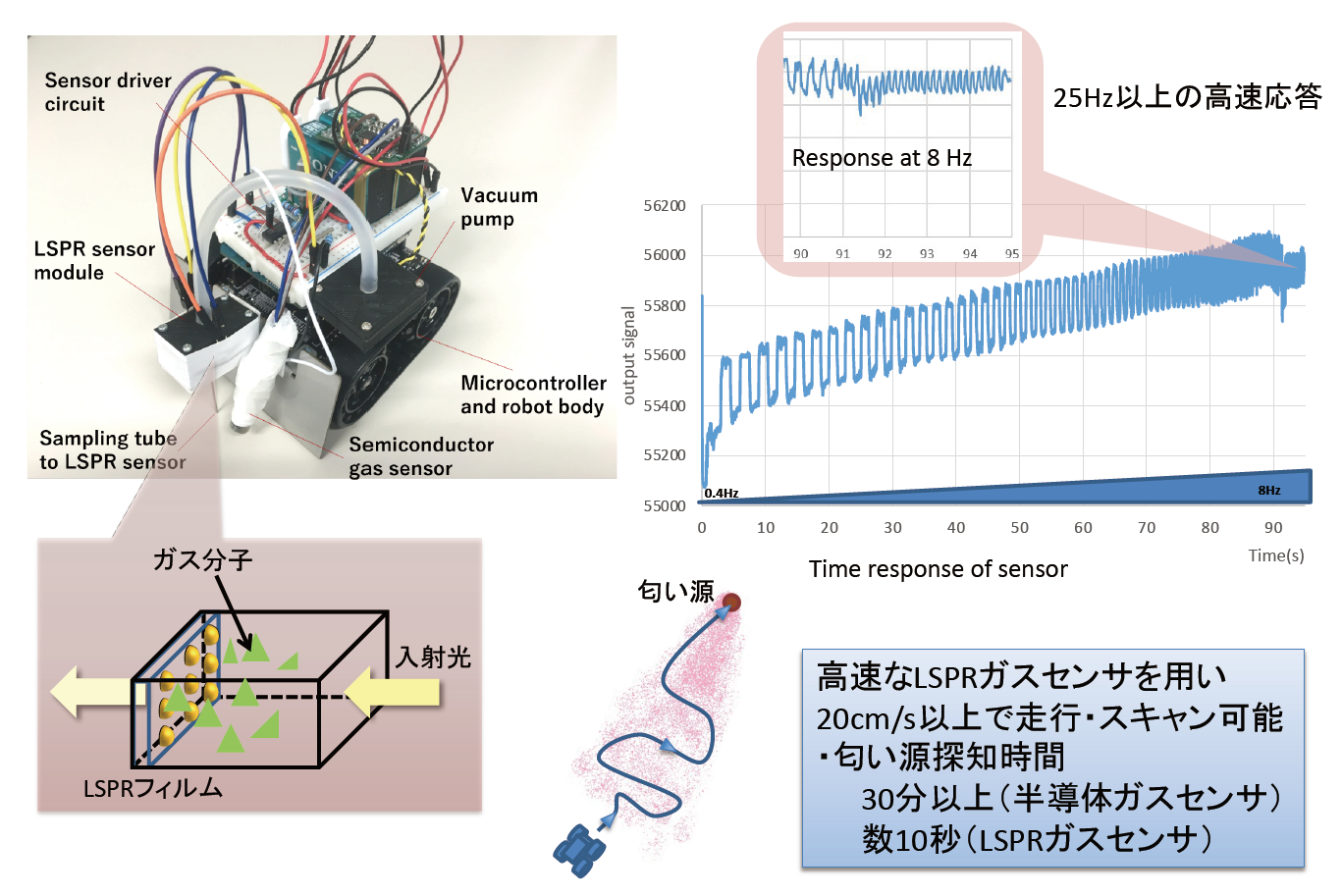 「匂いが見える鏡」を搭載した高速LSPRガスセンサロボット:従来の半導体ガスセンサよりも、スピーディーに匂いの発生源を辿ることができる
「匂いが見える鏡」を搭載した高速LSPRガスセンサロボット:従来の半導体ガスセンサよりも、スピーディーに匂いの発生源を辿ることができる また、この改良型のLSPRフィルムを搭載した「匂い識別ロボット」(LSPRセンサアレイ搭載ロボット)も開発しています。このロボットは、人間が操作をしなくても匂いのデータを大量に、自動的に収集することが可能です。既存のロボットはセンサが応答するまで10秒ほどの時間を要するため、動いては止まるを繰り返してしまいますが、このロボットはセンサがほぼリアルタイムで反応するので、スムーズに動けるという点が優れています。
 匂い識別ロボット
匂い識別ロボット コロナ禍による大学閉鎖の影響で、匂い痕跡画像データと機械学習を組み合わせる実験は一時遅れが生じていたが、匂い識別精度の高度化を実現することができた
コロナ禍による大学閉鎖の影響で、匂い痕跡画像データと機械学習を組み合わせる実験は一時遅れが生じていたが、匂い識別精度の高度化を実現することができた