まず取り組んだのが、UAVに適した観測システムの構築です。観測機器の小型化・軽量化に加えて、フライトコントローラーや、機械の状況を監視するヘルスメーターなどの開発も必要でした。機体の枠組みができてからは、水槽で観測能力を確かめる実験を重ねました。測定精度を調べるだけでなく、ソナーを設置した窓の下に気泡が入ると音波が遮られてしまうことや、構造上必要なボードが音波に与える影響などを確かめました。たくさんの泥臭い実験を繰り返して、ひとまず形になりましたが、アップデートしたいことは今もたくさんあります。
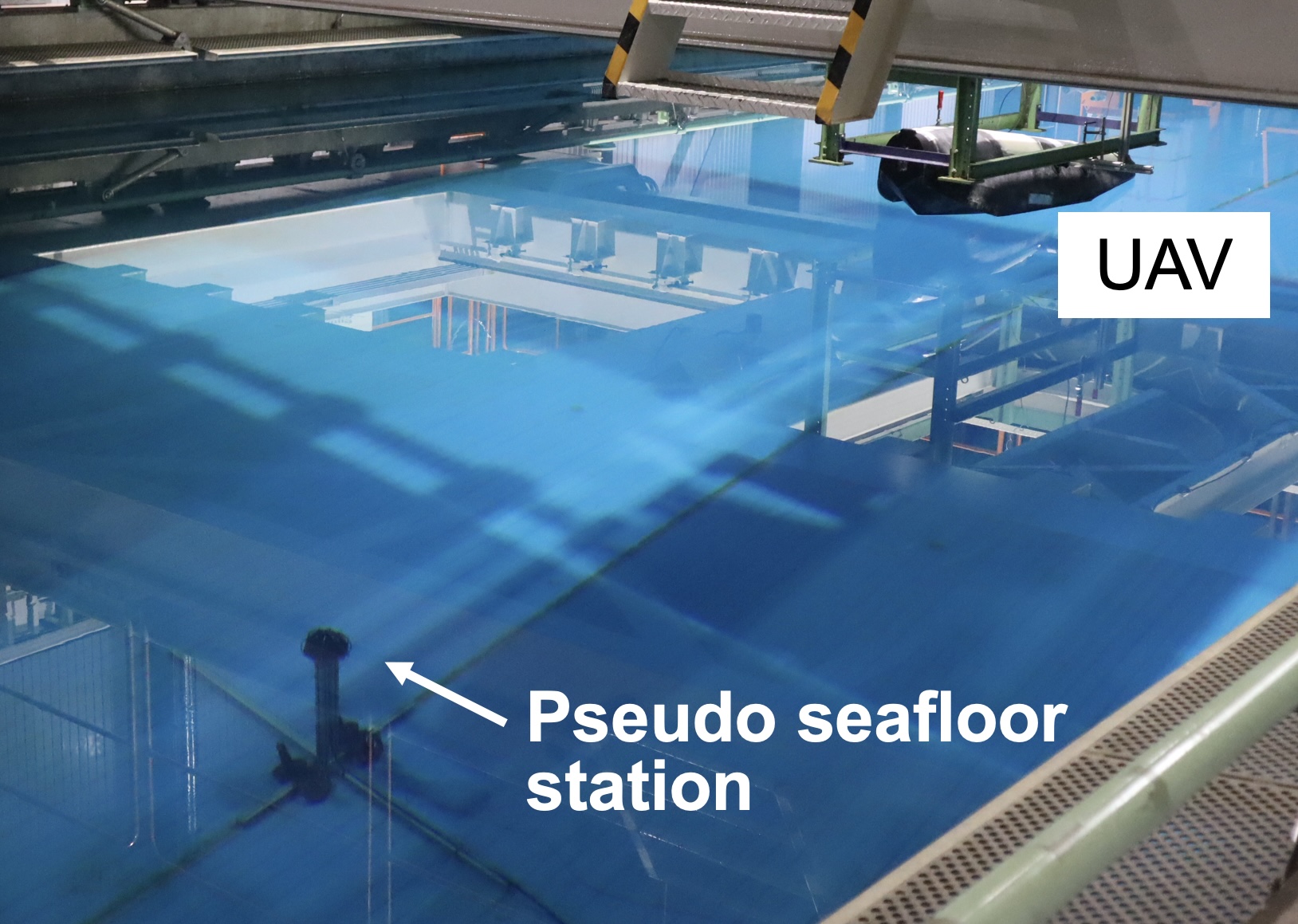
横50m×縦10m×水深5mの実験用水槽で試験機の性能を検証している様子。ソナー部分を水中に沈めたり、移動させたりしながら、通信試験を行った
共同開発者とともに、無人での離着水および海上移動が可能なUAVの開発を行いました。UAV試験機は全長6mほどもあって水槽では動かせないため、機体の動作に関わる実験はすべて海上で行いました。
実験は主に共同開発者の株式会社ハマが実施していますが、苦労したのは着水と離水です。特に離水時は、海面が波打つために制御が非常に難しく、実験でも何度も失敗しています。ポーポイズといって、機体の揺れが止まらず、姿勢のコントロールが不可能になってしまうのです。
着水も、滑らかな着水ではなく、海面に軽く叩きつけてスピードを落としています。人が乗る機体でこんなに跳ねたら乗員が気絶してしまいますから、無人だからこそできる着水ですね。

離水に成功したUAV。瞬間的に離水するために重要なのは軽いことであり、機体の表面はグラスファイバー、内部は主に発泡スチロールで作られている
この機体を用いて、世界で初めてUAVでの海底測地観測データの取得に成功しました。
現在は、風向きや天候などから離着水の可否を判断するシステムの向上に取り組んでいます。波の高さや向きをUVAが把握するためには、上空からの電波計測や、画像処理などの方法があります。一方で、飛行においては波よりも風向きが重要です。したがって、波と風、両方の状況を把握したうえで、「いいところ」を探す必要があります。難しい挑戦ですが、飛行艇の自律的な海洋離着水を可能にする技術は、この分野を大きく発展させる一歩になると期待しています。
動力源のガソリンエンジンは、アメリカの自動無人機によく使われているもの。自律的に離着水できるUAVは日本にしかない
高頻度かつリアルタイムな海底地殻変動観測を実現するため、新しいプラットフォームの構築に取り組んでおられる横田先生。UAVのなかでも翼型・離水タイプに照準を絞って開発を進め、無人観測機による海底地殻変動観測に世界で初めて成功されました。次回のインタビューでは、UAVの特性や、今後の海洋観測のビジョンについてもお伺いします。

