たとえば机を叩いたときは、叩いた場所だけが振動するのではなく、机全体に振動が伝わっていきます。これと同様に、レーザーを当てると、その箇所を加震源として超音波が励起され、波が広がっていきます。
つまり、接触媒質を使わず、離れた場所から非接触で検査対象物に超音波を送ることができるのです。この方法であれば、ロボットに搭載することでUTの自動化も将来的には可能になると考えました。


群馬大学
斎藤 隆泰准教授
Takahiro Saitoh
たとえば机を叩いたときは、叩いた場所だけが振動するのではなく、机全体に振動が伝わっていきます。これと同様に、レーザーを当てると、その箇所を加震源として超音波が励起され、波が広がっていきます。
つまり、接触媒質を使わず、離れた場所から非接触で検査対象物に超音波を送ることができるのです。この方法であれば、ロボットに搭載することでUTの自動化も将来的には可能になると考えました。
私の妻が長男を妊娠していた15年ほど前に、ヒントを得ました。当時お世話になっていた病院の産婦人科に、超音波を用いたリアルタイム胎児診断装置が導入されていたのです。
通常のエコー検査は2次元のモノクロ画像で、素人が見ても胎児の様子はほとんどわかりません。しかしこの装置は、縦・横・高さ・時間の4次元情報をもとに胎児の動きを映像化するため、医学の知識がなくとも手足や顔、性別まで一目瞭然だったのです。
この“わかりやすさ”が、非破壊検査にも必要だと感じました。波形を分析するのではなく、動画を見て「ここに欠陥がある」と誰でも判断できる方法を構築できれば、熟練検査員不足の問題はもちろん、AIによる判定の自動化も期待できると思いました。
 非破壊検査でレーザーを活用するアイデアは学生時代からあったが、当時は機械の性能が低く、実現に至らなかった。現在はレーザー超音波を高い精度で受信できるため、本システムの実現性が高まった
非破壊検査でレーザーを活用するアイデアは学生時代からあったが、当時は機械の性能が低く、実現に至らなかった。現在はレーザー超音波を高い精度で受信できるため、本システムの実現性が高まったただし、胎児は動きますが、構造物の欠陥は動きません。動かないものは4次元で表現できないため、発想を変える必要がありました。つまり、可視化する対象を欠陥ではなく、超音波の伝搬・散乱にシフトしたのです。
欠陥がなければ、超音波はスムーズに伝搬していきます。欠陥があれば、散乱します。この波の動きは、数値解析の技術を応用することで可視化できます。
CTでは、人体に対してあらゆる方向からX線を照射し、通り抜けたX線を検出します。その数値データからコンピュータ上で人体の輪切り画像を作成し、それらを合成して立体的な画像を作っているのです。
同じように、本研究でも1つの試験体に対して数百カ所にレーザーを照射し、超音波の伝搬データを取得(レーザー超音波可視化試験:LUVT)して、それらを合成することで4次元画像や、欠陥像を作成しました。すると、超音波が欠陥部分で散乱する様子や、構造物内部の欠陥の位置や形状をコンピュータ上で視認できるようになりました。
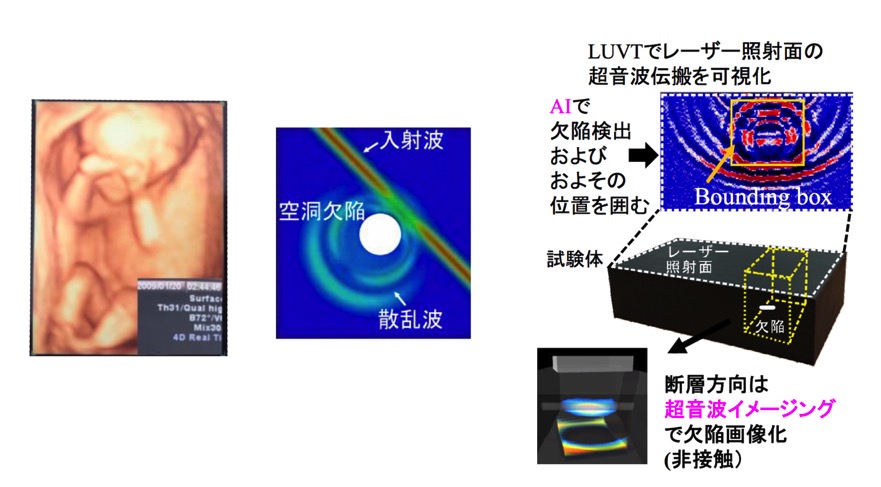 左:15年前の長男に対するリアルタイム診断の動画。中央:超音波が欠陥を通過できず散乱する様子(シミュレーション)。右:超音波イメージングの概要
左:15年前の長男に対するリアルタイム診断の動画。中央:超音波が欠陥を通過できず散乱する様子(シミュレーション)。右:超音波イメージングの概要通常のUTでは、超音波を構造物内部へ伝搬させ、欠陥や底面等からの反射・散乱波を受信した後、さまざまな要素を考慮して波形を分析する必要がありました。しかし、波が広がっていく様子そのものを可視化することで、欠陥の有無が一目でわかるようになってきたのです。
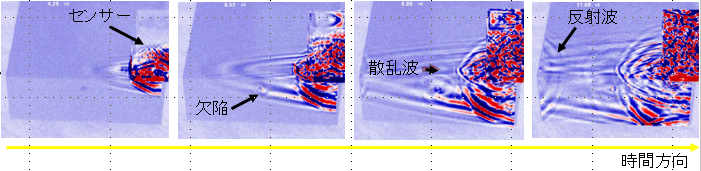 レーザー超音波により、高速・高感度で明瞭な波動伝搬を可視化できるようになってきた
レーザー超音波により、高速・高感度で明瞭な波動伝搬を可視化できるようになってきた