


- 2008年4月
- 日本学術振興会 特別研究員(DC1)
- 2011年3月
- 東京大学大学院 情報理工学系研究科 博士後期課程修了
- 同年4月
- 日本学術振興会 特別研究員(PD)
- 2013年4月
- 奈良女子大学 研究院生活環境科学系 講師
- 2021年4月
- 奈良女子大学 研究院工学系 准教授
人の触覚に訴える、新しいシステムを作りたい
小さい頃からゲームが好きでバーチャルリアリティ(VR)の技術にも興味があった私は、大学生の時、工学部の研究室で触覚を利用したVRに初めて接しました。VRの画面の中にある物体にペン型のデバイスで触れて、硬さや凹凸を感じる装置です。「VRの技術はここまで進歩しているんだ」と驚き、すごく面白い分野だなと思ったことを覚えています。
やがて、この分野に深く足を踏み入れるにつれ、現状と課題も見えてきました。力や硬さの触覚を感じさせるシステムは装置が大掛かりになりがちで、一般に流通させることは困難です。そのため、社会に普及している触覚技術の多くは、装置の振動を利用しています。例えば、スポーツゲームのコントローラーが振動して、ボールを打った時の感覚を再現するような仕組みです。しかし私は、振動を利用した装置がどれも似通った手応えである点に、物足りなさを感じていました。そして、触覚を利用した新しいシステムの提案ができないだろうかと考えるようになりました。
ロボットの指先の温もりが、人に感動を与える
一時期、触覚を再現する研究の一環で、遠隔操作できるロボットハンドシステムを開発していました。ロボットハンドが触れた対象物の硬さと温度を、ロボットを操作している人に感じさせるシステムです。この研究が、思わぬ転機になりました。
取材に来られた方がロボットハンドと握手して、「あったかい。確かに、操作している人の手の温もりが伝わってきますね」と、いたく感動されたのです。しかしそれは誤解で、実は、ロボットハンドの指先につけたセンサーが、電気の熱で温まっていただけでした。その誤解は解きましたが、あまりに感動された様子だったので、私もロボットハンドと握手してみたら、とても心地よかったのです。そのときに、温冷感の表現を追及すれば、訴求性の高いシステムができるという確信を持ちました。
今回の研究テーマである情動性を伝えるメディアは、温度を利用して温もりや潤いを伝えることを目指しています。例えば、遠方の祖父母がメディアを通じて孫の頭を撫でて温もりを感じる。あるいは逆に、抱っこされている感覚を赤ちゃんに伝えることで、安心感を与えられるかもしれません。
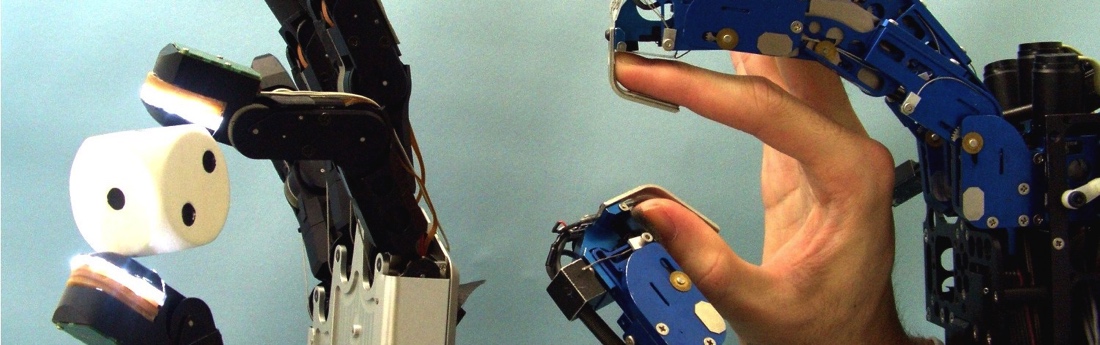 研究の転機になったロボットハンド。左側のロボットハンドでセンシングした情報を、人間の手に感覚として伝える。シリコンゴムでできた指先のセンサーの部分だけが、人肌のように柔らかくて温かい
研究の転機になったロボットハンド。左側のロボットハンドでセンシングした情報を、人間の手に感覚として伝える。シリコンゴムでできた指先のセンサーの部分だけが、人肌のように柔らかくて温かい装置の特性と、人間の触覚の特性を見極める
温度の再現には、ペルチェ素子を用います。ペルチェ素子は電流を流すと吸熱や発熱をする半導体で、電気による温度制御が可能です。人間が温かさや冷たさを感じられる温度はおよそ15℃から45℃までと意外に狭く、ペルチェ素子で充分に再現できるのです。
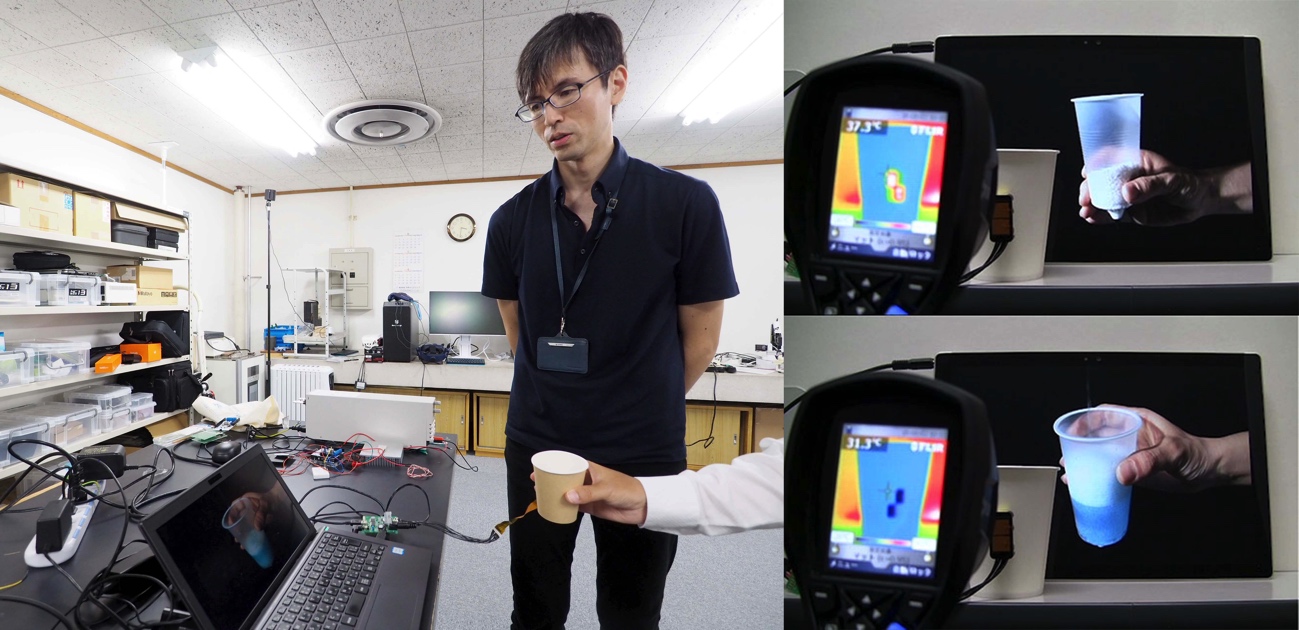
この素子を利用して、映像の中の温度を実際に感じられる「触感伝送モジュール」を開発しました。映像の中のコップに温かいものや冷たいものが注がれるのと同時に、手に持った空のコップに取り付けたペルチェ素子を通じて、温かさや冷たさを感じられるシステムです。
温度を利用して、湿り感を感じさせる研究もしています。実は、人の体に水分を検出する細胞は存在しません。乾いた布を冷やして触っただけでも、布の柔らかさと温度感覚によって、「布が湿っている」と錯覚してしまうことが実験で確かめられました。
このように、温冷感だけではなく湿り感も温度によって生み出せることが分かり、温度感覚を利用した表現の幅を広げることができました。
 触感伝送モジュール。人が触れる部分は4つのエリアに分かれていて、温めるときは右下と左上、冷やすときは右上と左下に電流を流す。エリアごとに温感と冷感の役割を分けることで、エネルギー効率が向上する
触感伝送モジュール。人が触れる部分は4つのエリアに分かれていて、温めるときは右下と左上、冷やすときは右上と左下に電流を流す。エリアごとに温感と冷感の役割を分けることで、エネルギー効率が向上する柔らかさをもつデバイスを目指して
硬い装置でも温度感覚を加えることである程度の情動性を伝えられますが、よりリアルな触り心地を目指して、他大学の先生方の協力を得て柔軟なデバイスの開発を行っています。
通常のペルチェ素子は、周囲を硬いセラミックで覆っています。柔らかいデバイスを作るには、素子をセラミックではなくシリコンで覆い、配線部分にも柔軟性を持たせるというアプローチになりますが、硬い素子と柔らかい素材を組み合わせると、境界部分が非常にもろくなってしまうのです。作っては壊れ、作っては壊れ、の繰り返しでした。
それに加え、ペルチェ素子は片面が吸熱して、その熱が反対側に移動するため、反対側が発熱します。この熱を逃すためには、ヒートシンクという排熱装置と一緒に使う必要があります。柔軟なペルチェを作ったところで、ヒートシンクが硬ければ意味がありません。共同研究者の先生方の協力を得て、ヒートシンクの改良と、小型でかつ曲面に沿う素子の開発に取り組んでいます。
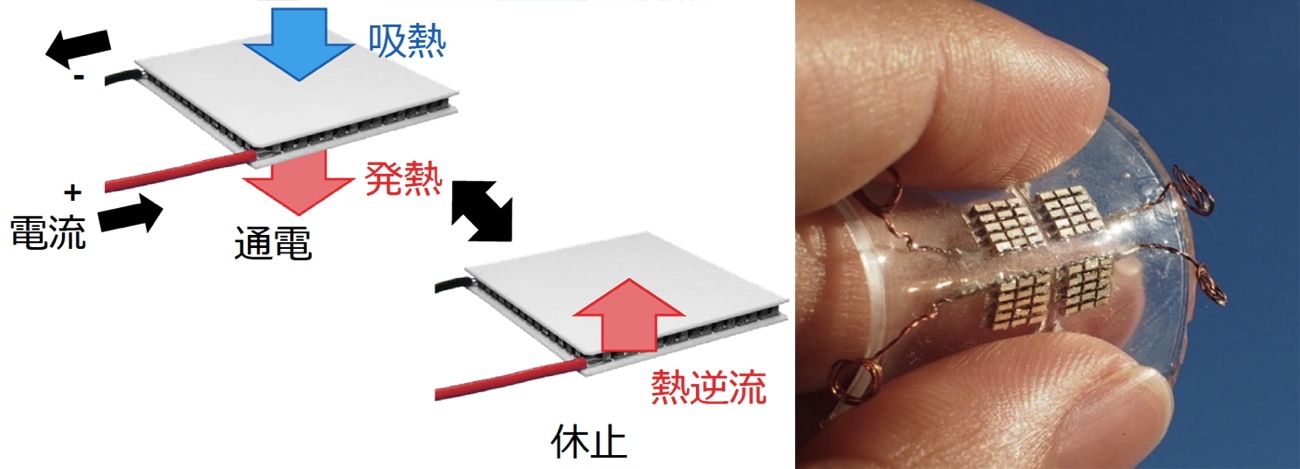 他大学と協力し開発中のフレキシブルペルチェ素子。素子の周りをシリコンゴムで覆って柔軟性を実現した
他大学と協力し開発中のフレキシブルペルチェ素子。素子の周りをシリコンゴムで覆って柔軟性を実現した