


「フォールバック制御に基づく攻撃耐性のあるマルチエージェントシステムの枠組みの確立」
シングルエージェントシステムにフォールバック制御を導入
研究では、まず、1台のドローンからなるシングルエージェントシステムにフォールバック制御を導入し、その有効性を実験によって確認しました。
安全性の確保のためには、攻撃検知器の精度向上が求められますが、ドローンが上昇中などの過渡状態にあるのか、ホバリングなどの定常状態にあるのかによって、システム応答は変化します。そこで、ドローンの状態を考慮した攻撃検知器を開発・実装し、過渡状態と定常状態それぞれに対して模擬的に攻撃を行いました。その結果、どちらの状態でも攻撃を検知し、その影響が出る前に制御を切り替え、ドローンを着地に導くことに成功しました。
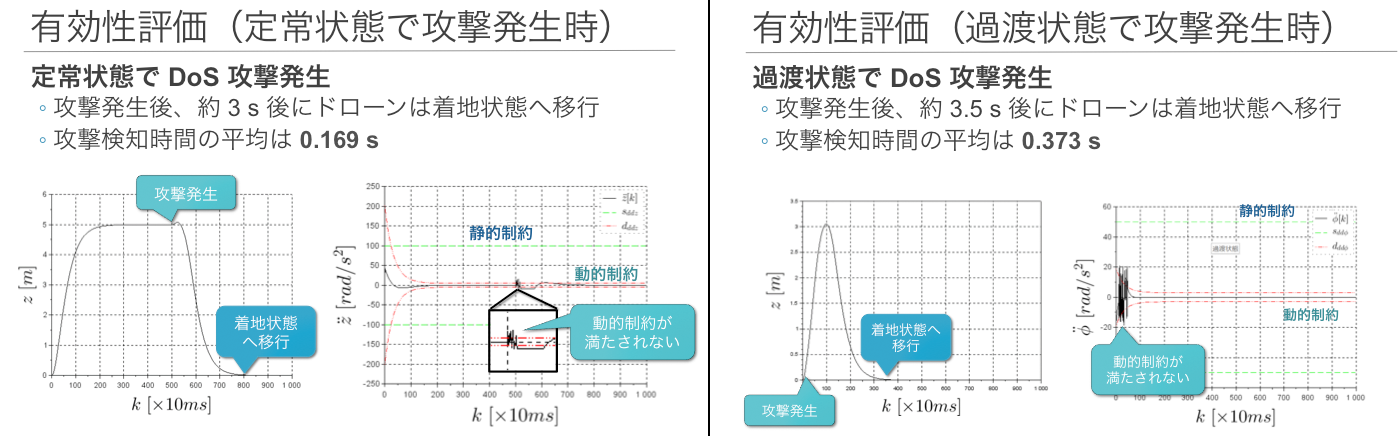 定常状態で攻撃が発生した場合の攻撃検知(左)と過渡状態で攻撃が発生した場合の攻撃検知(右)
定常状態で攻撃が発生した場合の攻撃検知(左)と過渡状態で攻撃が発生した場合の攻撃検知(右)マルチエージェントシステムを対象とした攻撃検知・制御に拡張
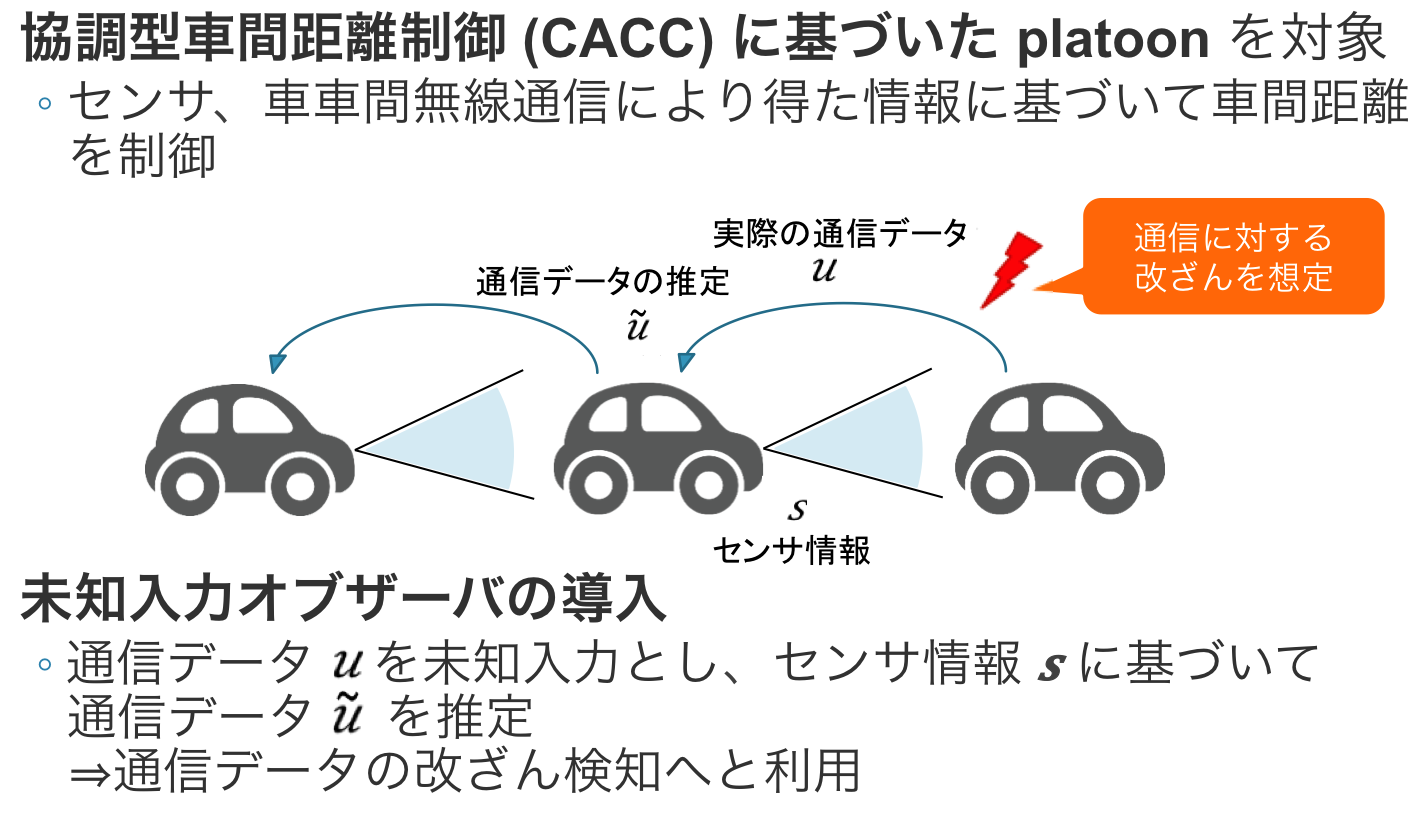
以上の検証結果をもとに、マルチエージェントシステムへの拡張を目指して、協調型車間距離制御(CACC:Cooperative Adaptive Cruise Control)に基づいた車両列(platoon)システムにフォールバック制御を導入し、攻撃検知と制御手法の開発に取り組みました。
CACCは、多くの自動車に実装されている先進運転支援システムの一つです。無線による車車間通信(前を走る車との通信)で受信したデータや、センサ情報をもとに、各車両が協調しながら制御を行うことで、安全な車間距離を実現するものです。しかし、false injection攻撃によって車車間の通信内容が改ざんされてしまうと、事故につながる恐れがあります。
そこで、platoonシステムに未知入力オブザーバーを導入し、既知情報であるセンサ情報から未知情報である通信データを推定し、その推定値と実際の通信データの比較を行うことで改ざんを検知する手法を考案しました。
ただし、車車間通信に対する攻撃は、一時的な通信データの改ざん、CACCに対する恒常的な改ざん、車両の衝突リスクを招く重大な改ざん等、攻撃の種類によって深刻さが異なります。そのため、深刻度に応じた段階的なフォールバック制御が必要であり、その検討も進めているところです。
 協調型車間距離制御(CACC)に基づいた車両列(platoon)と未知入力オブザーバーによる通信データの推定と検知
協調型車間距離制御(CACC)に基づいた車両列(platoon)と未知入力オブザーバーによる通信データの推定と検知研究者同士の交流やメンタリング指導が豊富
この挑戦的研究助成のことは、同じ研究室の潮俊光先生のご紹介で知りました。採択後、情報科学研究科の矢内直人先生もこの助成を受けていたことを知り、とても驚きました。
コロナ禍で外出の機会が制限され、学会などで外部と意見交換を行うことも少なくなっていたのですが、選考委員の先生方によるメンタリング指導や、研究者同士で交流する場を設けていただき、とても有難かったです。他の助成では、そうした機会が与えられることはあまりないので、感謝しています。
セキュリティは急速に発展している分野であり、あらゆる場面で強く求められ、同時に厳しく評価されるようになってきました。現在の研究は、いずれもコンピュータシミュレーションによる検証ですが、将来的には社会実装を目指し、セキュリティ分野の発展に貢献していきたいと考えています。
 フォールバック制御では、安全性を確保するためには攻撃検知後の制御をどのようにするべきかについても、考える必要がある。そこが困難だが、最もチャレンジしたい部分でもある
フォールバック制御では、安全性を確保するためには攻撃検知後の制御をどのようにするべきかについても、考える必要がある。そこが困難だが、最もチャレンジしたい部分でもある