

「位置推定インフラに基づくヒト・モノ・コトの長期・精密トラッキング」
1秒で場所を特定するUMap
そこで本研究では、AGVでも、SLAM技術でもない、事前マップを活用したクライアントサーバ方式の位置推定インフラストラクチャシステム「UMap:Universal Map」を提唱しています。
昨年度はメール便台車追跡実験を、青山学院大学の相模原キャンパスO棟にて行いました。まず建物の3D−CADデータを用意し、建物内のすべての画像を、20㎝毎8方向、計4万枚の画像データとしてあらかじめ作成し、サーバに保存しておきます。次に、台車(クライアント)が建物内を移動します。その場で撮影した画像はWi−Fi通信により、瞬時にサーバへと送られます。その撮影画像と4万枚のデータベースとの“類似度計算”をすることで位置推定を行うという、極めて単純な方法です。平成29年度の実験では、1秒足らずの間に誤差10㎝の精度で、台車の現在位置を推定することができました。
このように本システムを中小企業などにおいて実装できれば、物流倉庫の自動化が可能になり、大きな経済効果をもたらすことでしょう。ゆくゆくは空港や病院などでの搬送システムにも応用するなど、さらなる汎用化と効率化を目指しています。
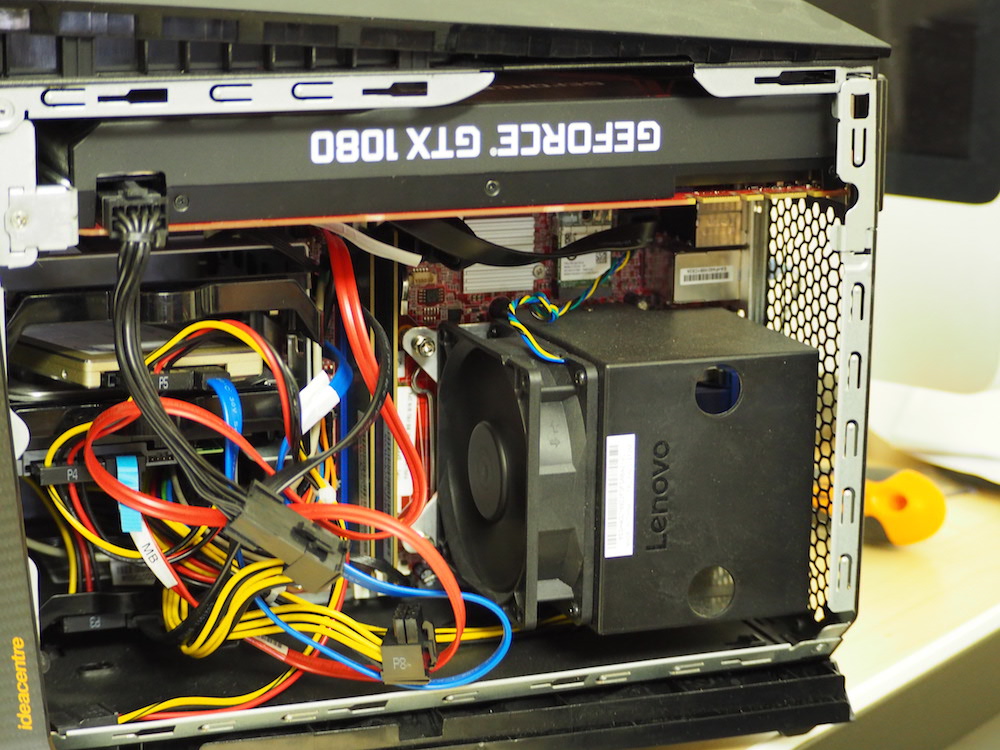 サーバは、市販されている安価な一台のゲーミングPC
サーバは、市販されている安価な一台のゲーミングPC新しい研究体制を組み、社会実装を目指す
私は、工学的な研究をすすめる場合は理論と実践の両方を同時に行わなければならないと考えています。考案した理論を実践の場で具体化していく過程では研究費が必要です。これまでは研究を進めると同時に様々な助成金公募に申請してきましたが、不採択の通知を受けてがっかりするという日々が続いていました。そんな時にふとしたことからセコム科学技術振興財団の「挑戦的研究助成」の存在を知りました。実は研究助成のことを知ってから締め切りまで3週間程度しかなく、半ばあきらめの気持ちもありましたが、なんとかアイデアをまとめることができました。これまでに不採択通知を受ける度に研究の意義や方法を見つめ直しアップデートし続けていたのが功を奏したのだと思います。
無事、助成金をいただいてからは、以前は資金的に難しかった研究が可能になっただけでなく、学生や共同研究者で構成する本格的な研究体制を組むことができるようになりました。
メンタリングでは、社会実装について意識せよとのアドバイスをいただきました。私達研究者は「論文さえ認められれば……」と、安易に考えてしまいがちです。自身の研究をどのように社会に還元していくか、という点の検討が二の次になってしまうことが少なくありません。財団の担当者からのアドバイスは、非常に生産的かつ貴重なものでした。
 鹿児島大学での新しい研究室の立ち上げに奔走していますと語る高橋先生
鹿児島大学での新しい研究室の立ち上げに奔走していますと語る高橋先生バランスがとれたテーマで申請に挑むべし
この「挑戦的研究助成」は、若手研究者にとって大きく飛躍するチャンスだと思います。申請内容は、時代のニーズを先取りしたり、流行を追うなどの要素も大切ですが、採択を意識しすぎて“目先の利益”にとらわれてはいけません。「実社会から求められること」と「自分にしかできないこと」の両方のバランスがとれたテーマで挑んでいただきたいと願っています。